Debunking Bat Speed Myths

With the ability to measure bat speed and pair the findings to launch monitors and 3D motion devices, the claims on the relationship between bat speed and batted-ball characteristics can finally be examined. Coaches opinions on training bat speed vary, with some claiming that exit velocity will often increase with a decrease in a hitter’s bat speed. Part of this seems to come from the idea that bat speed comes at the expense of barrel control, which we’ll dive into later. This notion may appear logical, especially for those with experience executing or coaching the fine motor skills it takes to hit a baseball, but is it really true?
Foundations of Hitting
30 modules teaching you everything we know about hitting and hitting mechanics.
Making connections between swing characteristics and batted-ball events is a novel concept with little documentation throughout the baseball world. Fortunately, we have been collecting our own data on in-gym hitters in this format over the past year with the use of bat sensors and launch monitors. This post attempts to bring some clarity to bat-speed debates raging in clubhouses and social media through the pairing of our internal Blast and HitTrax data, which allows us to link swing metrics to batted-ball events. We specifically examine the claim of lower bat speed equating to higher exit velocities and explore other relationships with bat speed and the implications with training hitters.
Bat Speed Explained
Let’s begin with a brief explanation of the basic physics of hitting a baseball, specifically what causes a baseball to come off the bat with a high exit velocity.
These are the aspects that directly create exit velocity in a batted ball:
- bat speed
- mass of the bat
- pitch speed
- collision efficiency (hitting the ball on the sweet spot)
All other factors are indirect parts of the equation that produce bat speed. Hitting is a ballistic movement, which means that the body quickly transfers energy from the middle of the body to the limbs (proximal to distal) until it reaches the most distal segment. In hitting’s case, the hand transfers that energy to the bat which imparts that energy to the ball, sending it as a projectile.
These are the ways to produce higher exit speeds:
- increase the speed of the most distal segment (the bat)
- decrease vibration on contact (sweet spot)
- increase the speed at which the ball is pitched
When controlling for bat and ball type, weight, and speed, it is clear that moving the bat faster is the only way to produce a higher exit velocity.
Note that we are discussing exit velocity and not distance traveled. The factors impacting the ball after contact are gravity, atmospheric conditions, and spin. With the exception of playing at extreme altitudes, these environmental aspects do not significantly impact the bat-to-ball collision that relates to the exit velocity of the batted ball.

Become the Hitter You Want To Be
Train at Driveline
Since this is the case, hitters can control two factors: the speed of the bat and hitting the ball flush on the sweet spot. So, if two hitters hit the ball flush with the same pitched ball speed, using the same ball and bat at the same field at the same time, the hitter who struck the ball with the barrel of the bat traveling the fastest at impact (Blast’s measurement of bat speed) will have produced a higher exit velocity.
There is a subtle implication in the arguments that high bat speed is bad, that the faster the bat is swung the less likely chance of hitting the ball flush. This belief seems eerily similar to the arguments that the harder one throws, the worse command one has. As mentioned earlier, the good news is we now have tools to measure and test the validity of these beliefs.
Quantitative Analysis of Bat Speed, Exit Velocity, and Productive Hitting
Now, let’s get into the statistical relationships among bat speed, exit velocity, and productive hitting. We have established that bat speed is an important aspect of a high exit-velocity hit from a physics standpoint, but running some correlations on our in-gym hitters can give us a better idea on just how important.
By revisiting the data used in previous blog posts on pairing Blast and HitTrax data, we developed the table below, which displays a correlation matrix between bat speed and basic batted-ball parameters over our paired Blast and HitTrax batted-ball data.
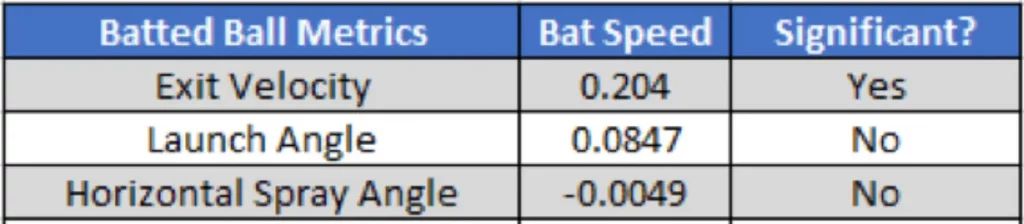
(The correlation matrix indicates that bat speed has a significant correlation with exit velocity, whereas bat speed has relatively low association with launch angle and horizontal spray angle for hitters training in our gym)
With a sample size of 9,000 swings taken from our in-gym hitters during machine work, we see that exit velocity and bat speed have the strongest relationship, whereas both launch angle and horizontal spray angle share insignificant relationships with bat speed. (Also mentioned in our original blog post pairing HitTrax and Blast data is the extremely strong relationship [.88 correlation] between the bat speed and power metrics.) While the .204 correlation between bat speed and exit velocity may not seem especially noteworthy in absolute value, the 9,000 swings included in our sample help lower the minimum threshold needed to find to a significant relationship between bat speed and exit velocity. Therefore, despite misreads, different bats being used, and varying talent levels of our athletes, there is reasonable statistical certainty that bat speed and exit velocity have a positive correlation.
However, using a swing-by-swing analysis has its limitations when looking at bat speed and batted-ball metrics because there are so many factors that can strongly influence the results of each swing: pitch quality, bat type, fatigue, misreads, etc. So, we decided to look at a more robust set of numbers and analyze our hitters’ (hitters who have a larger sample of swing and batted-ball data paired together) own descriptive metrics of exit velocity and bat speed: means, maximums, and even standard deviations of those two metrics, as well as Blast’s Time to Contact metric. We also lumped in the proportion of “mishits” for every hitter, following Statcast’s own classification of a poorly hit ball (< under 59 EV) as a proxy for barrel consistency and bat-control abilities.

We can see a huge positive linear relationship between average exit velocity and average bat speed and between max exit velocity and max bat speed with values of 0.823 and 0.841, respectively. In addition there are large, negative correlations between average and max bat speeds and both average time to contact metrics, as well as proportion of mishits. In other words, higher max and average bat speeds per hitter indicates a lower average time to contact and a lower proportion of mishits. This is not surprising considering that we have also found a correlation between batter talent level and bat speed when bucketing players by level.
For another look, below is a table of respective p-values for a slew of pairwise correlation tests.

The demonstrated relationship between bat speed and batted-ball metrics provides a straightforward link between bat speed and overall performance at the plate; however, it does not directly measure the relationship between bat speed and production. As a result, we classified each hitter in our sample as either having fast, medium, or slow bat speed, based on their Blast averages (>+1 SD of bat speed = “Fast”, <-1 SD of bat speed = “Slow”) and bucketed their BIPs accordingly. We then calculated each BIP’s wOBACON (wOBA on contact) and averaged the results to generate the tables below.

The results indicate that “Fast” bat speed batters performed better than “Slow” bat speed batters by 139 points of wOBACON on all BIPs and 213 points on squared-up BIPs. So, we have clear evidence that maximizing bat speed is critical to improving performance at the plate. This is especially true when specifically looking at squared-up pitches, as greater bat speed allows players to maximize production when hitting a pitch with flush contact.
How does this relate to the contention that coaches often see their players lower their bat speeds and produce higher exit velocities with more consistency? Through our in-gym hitter analysis, it is clear that batters do not produce higher exit velocity or better performance at the plate when lowering their bat speeds, because the relationship between the two is positive and almost directly linear.
We can go one step further and normalize each player’s bat speed on a given swing as a percentage of their estimated maximum bat speed (calculated as the average mph of their top 10% fastest swings) to compare batted ball outcomes with swing intensity. Using wOBACON as a measure of performance, we find that batters perform best when bat speed is between 90-95% of their max-effort swing, and they struggle when bat speed is below 85% of their max-effort swing.
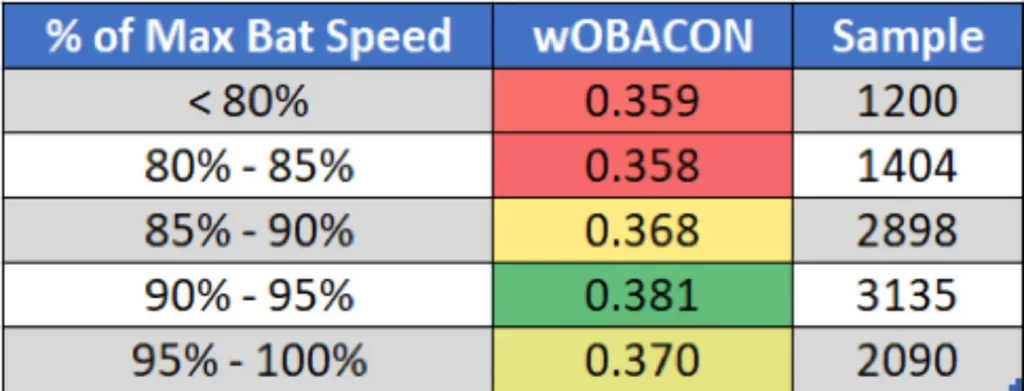
(This further aligns with the case to improve bat speed, since improving max bat speed should also mean that the percentages of max bat speed also improve.)
Although there may be some individual cases of hitters lowering their bat speeds and producing higher exit velocities on a pitch-by-pitch basis, we did not find any data to support this case on any sort of consistent basis. Several things may explain the interpretation of these rare cases, such as confirmation bias by players and coaches, pitch-to-pitch variance, and even misreads by bat sensors. This further leads to the erroneous conclusion that bat speed is at odds with making solid contact and, therefore, exit velocity.
Now, these findings may seem obvious, especially when comparing the bat speed of high school and low-level amateur players to college and professional players who have a wide range of talent. But what about when we compare players at the MLB level who almost assuredly all have elite bat speed? Can we disseminate good hitters from bad ones using an estimate of bat speed at the highest level?
This question is difficult to answer, because although there have already been some valiant efforts by analysts to obtain MLB swing speed estimates via Statcast data; most publicly available estimates of swing speed have overfit with exit velocity due to assumptions regarding collision efficiency. This has caused most public swing-speed estimates to correlate too closely with batted-ball outcomes, leaving us hesitant to use these estimates in our analysis.
As a result, we developed our own proxy of MLB swing speed using only barreled-up BIPs in our HitTrax/Blast and Statcast database. By filtering out non-barreled batted balls, each BIP in our dataset has a collision efficiency estimate that is near maximum value, allowing us to avoid making the varying assumptions regarding collision efficiency on a per-swing basis that others have been forced to make.
With a straightforward way to isolate the effect of bat speed on exit velocity, we simply calculated the average “peak exit velocity” for each player in our Blast/HitTrax data and ran a regression predicting the value of a player’s average peak exit velocity against their average bat speed. Finding a respectable R^2 value of .6125, we fit this equation to a 2018 Statcast leaderboard and generated measures of average swing speed (per Blast’s definition) for each position player in Major League Baseball.
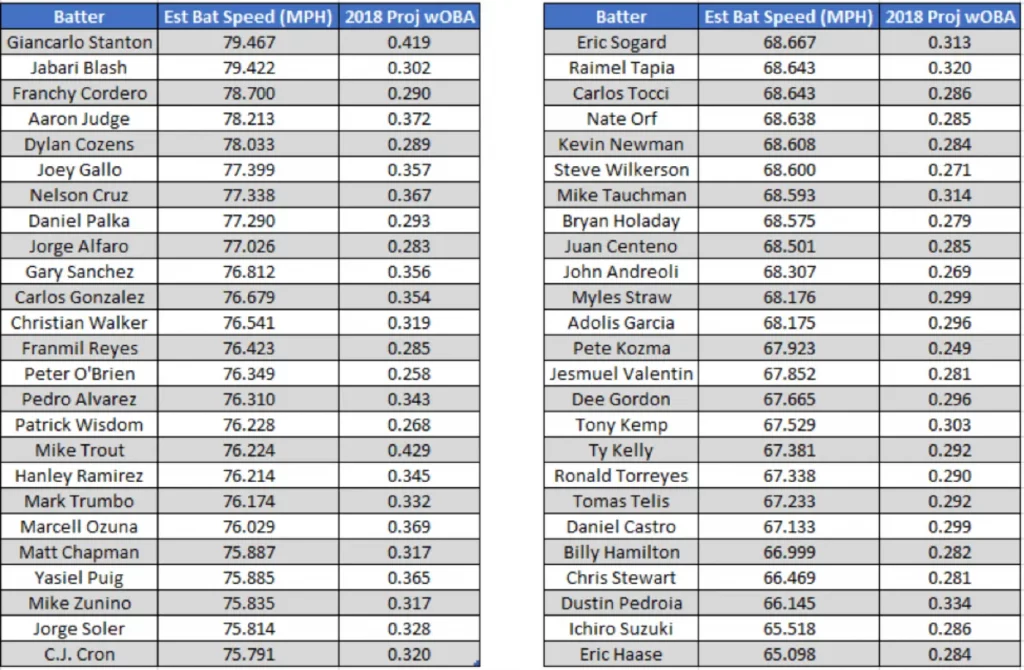
As shown above, our estimates of swing-speed leaders and laggards align closely with intuition and, more importantly, do not seem to overfit bat speed with a player’s average exit velocity.
With confidence that our bat-speed equation provides us with fairly accurate estimates at the MLB level, we ran a simple regression comparing batters’ 2018 Steamer projected wOBA (a proxy for batting talent) to their 2018 MLB average bat-speed estimate. In obtaining an R^2 value of .15 between the two measures, we found evidence to suggest that the relationship between bat speed and true talent is fairly similar to the relationship between fastball velocity and various talent estimators for pitchers.
Given that it is widely accepted that developing fastball velocity is incredibly important to having success on the mound, we can conclude that bat speed is also a vital component to performing at the plate as well.
Bat Speed and Training Hitters
Now that we have more clarity on the relationships among bat speed, exit velocity, and offensive production, let’s examine the implications of these findings on training productive hitters.
In the data from our in-gym hitters mentioned above, there is a clear relationship between bat speed and exit velocity, and since exit velocity is one of the main indicators of a productive batted ball, it must be included in the development of hitters.
The ways to train bat speed are well documented, and at Driveline, we train this predominantly with overload/underload bats, velocity-based training in the weight room and, perhaps most importantly, the intent to hit the baseball hard. The intent to hit the ball hard is two-fold. As physics demonstrates, swinging the bat fast and making contact with the least amount of vibration (sweet spot) are the two main factors in exit velocity. So, when intending to hit the ball hard, the intent to move the bat fast and hit the ball square on the barrel are equally important to train.
There can be debate on which focus is more important, but it seems counterproductive to discount the intent of moving the bat fast. While it is clearly never a good idea to tell a hitter to decrease his bat speed in order to produce a higher exit velocity, as seen by many on twitter, it is not uncommon for MLB hitters to feel like they are swinging slower in order to hit the ball harder. ALTIS is known for saying that acceleration may feel slow to elite athletes, but through our in-gym and MLB data, it is clear that the bat itself is not moving slower despite the feel of the athlete. This is a good example of how feel isn’t real and a coach needs to focus on how to communicate those differences to his hitters. This is why we find it so important to use launch monitors and bat sensors when available, because they can assist with pairing the hitters feel to what the bat and ball are actually doing—similar to how a pitcher would want to use a ball-tracking device and camera to pair feel and real when learning a new pitch. If a hitter feels like he is swinging the bat slow but exit velocity and bat speed are increasing, then he knows what he must feel in order to accomplish both.
Since we have thoroughly explored the relationship between bat speed and exit velocity and a better way to go about training it, let’s examine some other relationships between bat speed and quality hitting that are worth training.
Referring to the original blog post pairing Blast and HitTrax data, we can see a negative correlation between bat speed and time to contact. We also find that this trait is associated with our group of professionals since their bat speeds are higher and time to contacts are lower than amateur hitters’.

We can also deduce that professional hitters have a propensity for allowing the ball to travel deeper in the zone. With depth of contact being measured as the distance from the back of home plate, our pro hitters make contact on an average of 23.52 inches from the back of home plate, a little more than three inches deeper in comparison to high school hitters (26.13 inches) and a little less than one inch (24.22 inches) in comparison to college hitters. This finding can help us explain the lower time to contacts because this metric is highly dependent on where the hitter makes contact with the ball in relation to the plate. If the hitter makes contact deeper, time to contact will be lower; if contact is made out front, then time to contact will be higher.
There is also a relationship with bat speed as well, since Blast measures barrel speed just before contact is made. This speed is likely to be lower the less time it has to travel (deep contact) and higher if given more time and space to travel (out-front contact). Since our pro player’s swing the bat faster and have the ability to hit the ball deeper, it is unlikely that decreasing one’s swing speed will produce a lower time to contact. Because of the negative correlation between bat speed and time to contact, it is rather more likely that deepening the point of impact is responsible for the lower time to contacts.
If the ability to make solid contact deep on the plate with high bat speed correlates to a higher skill level of hitting, then we must find additional ways to train this skill. In the meantime, one of our favorite drills for doing so is the depth ladder. For this drill, place three balls on the middle of the plate and about 8-10 inches from the front of the plate and task the hitter with making flush contact at alternating depths. We expand upon the skill behind this drill by using overload/underload bats and hitting Plyo Ball ® to reinforce both the hitter’s intent to move the bat fast and hit the ball flush on the sweet spot of the bat. To stabilize this skill to transfer to game at-bats, we add in a randomized component of mixed batting practice or high-speed machine work.
Conclusion
We know bat speed is an important tool in becoming an effective hitter and producing a batted ball with high exit velocity. Coaches must train hitters accordingly with the intent to swing the bat fast and make flush contact, train with some variability and use technology when available to pair the outcomes of bat speed and exit velocity to the hitter’s feel.
We intended this article to bring to light not only the physical and statistical components of the importance of bat speed and debunk the myth of lower bat speed and higher exit velocities, but also to make the jump from bat speed relationships to training hitters. The importance of bat speed is obvious from a basic physics standpoint, but with a statistical analysis, it is nice to see the linear relationship on paper, along with other correlations that can bring some clarity to training hitters. In short, hitters must swing the bat fast, no matter what they feel and what it takes to do so. Coaching techniques for producing this outcome may vary, but the importance of bat speed remains unchanged.
Train at Driveline
Interested in training with us? Both in-gym and remote options are available!
- Athlete Questionnaire: Fill out with this link
- Email: [email protected]
- Phone: 425-523-4030
Comment section
Add a Comment
You must be logged in to post a comment.
Jeff -
When measuring/quantifying the depth of contact in relation to home plate, is the position of the batter in the box being measured as well?
It’s my antidotal observation that MLB hitters are almost always set up on the back line of the batter’s box while HS hitters very rarely are. So, while the HS contact point/depth of contact may be more forward of the plate than MLB hitters, it’s possible that it’s essentially the same contact point as it relates to the hitter themselves.
Wouldn’t measuring the depth of contact in relation to a hitter’s front foot be a more valid comparative measurement between MLB, college & HS hitters?
Driveline Baseball -
Jeff-This is a valid point. Setup will definitely affect point of contact data. We standardize back foot placement and then place hitters into stride length buckets. That way, we have stride length in the equation and point of contact is taken care of relative to the hitter. When working with a hitter individually, we will be taking into account all body positions at point of contact.
Daniel Campbell -
So for this study did the batters setup/sqaure up in the same position in relation to homeplate regardless of stride? If so, where was front foot placement set? Or did all the batters setup in different batters’ box depths in relation to homeplate?
David Besky -
Daniel – thanks for the question. We standardized back foot placement by painting a line at the back of the batter’s box where every hitter placed their back foot. We then went through and ranked each hitter’s stride length to account for that.
Ashton -
Hi, I was wondering if you tested how the weight of the bat impacted both swing speed and also distance traveled? 34oz bat vs. 36oz bat vs. 38oz bat?
David Besky -
Ashton – in our study here, we only tested standard game bat weights, and made the assumption that all of these were 31oz, which is what we are constrained to given the information collected. Ideally, bat speed should always be precisely adjusted for bat weight to compare batters on equal playing field. This piece here (https://www.acs.psu.edu/drussell/bats/batw8.html) does a good job talking about the differences at varying bat weights.
John Fits -
I saw you were using Blast Connect. Did you ever look at Hand Speed vs Bat Speed. I just got one and found that there was actually a negative correlation between the two for me after a point. I saw on another post on another website that the excess hand speed may have had to do with having a longer swing (not keeping my hands inside the ball) when combined with what I’ve been told is a very rotational swing. I also found that this happened when I really muscled up to try and swing harder. When I focused on keeping my hands in and being quick to the ball, the bat speed was considerably higher. In fact, just as you guys observed, the metric with the strongest correlation to bat speed was time to contact, which to me kills multiple birds with one stone right?
David Besky -
One thing we will look at in regards to Hand Speed and Bat Speed is a ratio of the two, which we dub efficiency (bat speed/peak hand speed). We like this metric summarizing the relationship between the two as it provides information on if the hitter is releasing the barrel of the bat on time and in the right direction. A variety of different thought processes may produce desirable results for a specific hitter, so it’s entirely possible it could benefit athletes to think about swing faster rather than swinging harder – in terms of mechanical efficiency as well as not muscling up. In regards to bat speed being correlated with time to contact, it does present the question about which direction the causality is, since all else being equal a swing with a greater bat speed will have also have lower time to contact. So in that sense, training bat speed is killing two birds in one stone, by indirectly lowering time to contact as well.
Anthony Mendez -
Per the chart, “Fast” bat speed batters performed better than “Slow” bat speed batters by 231 points on squared-up BIPs not “213” as stated. I’m sure that’s just a typo.
DrySwings StrikeZone -
Curious on the relationship with how tight of a grip on the bat can play in bat speed,
meaning a FIRM grip which as a hitter feels less mobile and agile, vs a slightly looser grip.
If there is already an article on this, feel free to forward me the link. Thanks for your help in improving the quality of play in the game of baseball.