SIMULACIONES DINÁMICAS PROGRESIVAS DE LA MECÁNICA DE LANZAMIENTO
Marzo 8, 2017
Anteriormente en Driveline Baseball, presentamos una emocionante e informativa serie de tres partes del Dr. James Buffi sobre su trabajo hacia un nuevo enfoque innovador del entrenamiento y la prevención de lesión del codo que tiene el potencial de proteger mejor el eslabón débil de un lanzador: el UCL (Parte uno). Si bien los métodos tradicionales han analizado la mecánica de pitcheo utilizando un enfoque inverso, calculando fuerzas y torsión en función de los ángulos y posiciones articulares observadas (Parte dos), el Dr. Buffi estableció un enfoque Dinámico Progresivo que puede determinar con mayor precisión las contribuciones musculares individuales para proteger el UCL utilizando una nueva estructura de simulación (Parte tres).
(Este artículo fue escrito por Matthew Wagshol, Biomecánico del Departamento de Investigación y Desarrollo de Driveline Baseball).
Driveline Baseball R&D ahora ha validado este enfoque de simulación y en esta nueva serie de tres partes, revelaremos el funcionamiento interno del proceso modelado, discutiremos nuevas ideas del análisis de datos resultantes y luego veremos más experimentos y estudios de casos que mejorarán aplicaciones del modelo a los protocolos de entrenamiento de lanzamiento.
(Nota de Kyle Boddy, Director de I + D: es difícil para mí exagerar lo emocionante que es este proyecto de años y lo importante que puede ser para el béisbol. Representa una forma completamente nueva de modelar el movimiento de lanzamiento analizando los tejidos blandos y calculando salidas musculares para desarrollar un método “progresivo”, que podría conducir a formas mucho más granulares para probar y entrenar a los lanzadores del béisbol).
Comencemos sumergiéndonos en la simulación de lanzamiento de acceso abierto revisada por colegas de la disertación del Dr. Buffi (1) y obtengamos una comprensión detallada de lo que se necesita para producir un modelo preciso de Dinámica Progresiva.
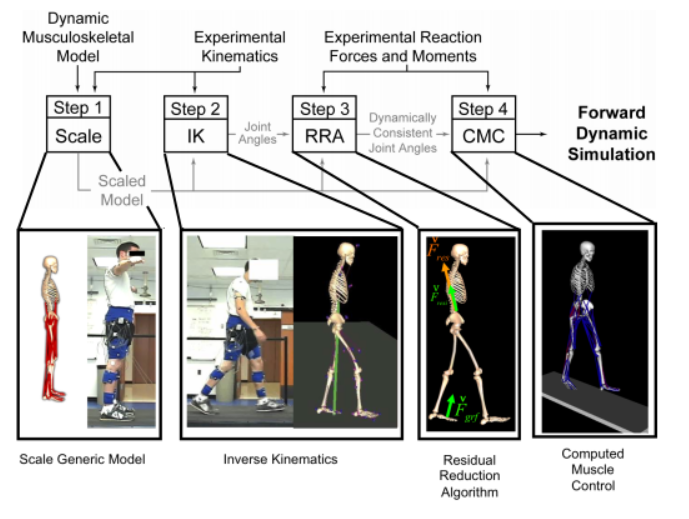
- Guía de la simulación generalizada de Dinámica Progresiva (6)
Captura de movimiento
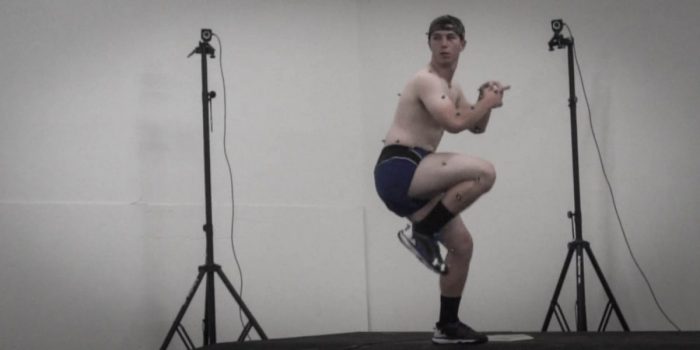
Antes de que pueda comenzar una simulación, tenemos que capturar el movimiento de un lanzamiento. Esto generalmente se realiza utilizando un sistema de captura de movimiento basado en marcadores con cámaras de alta velocidad y placas de fuerza. Para nuestra validación del modelo de Dinámica Progresiva, utilizamos el mismo caso de lanzamiento ideal que el Dr. Buffi, de un documento separado de 2008 (2) para comparar nuestro modelo y validar su precisión. En este estudio, el movimiento se capturó utilizando un sistema de captura de movimiento Vicon 612 de 7 cámaras y tres plataformas de fuerza AMTI.
Modificación de modelo
Los datos grabados de los marcadores experimentales se trazan en un modelo de código abierto de biomecánica del cuerpo humano utilizando la plataforma OpenSIM ,que se actualiza específicamente para estudiar el codo durante el movimiento del lanzamiento. Esto se logra mediante la modificación de un modelo estándar de cuerpo completo masculino del percentil 50 reemplazando el brazo derecho con un modelo muscular refinado de la parte superior del brazo (3). Se hicieron otros ajustes al modelo para adaptarse mejor al análisis del lanzamiento, incluida la adición de un grado de libertad (DOF por sus siglas en ingles) Varus-Valgus en el codo (4), centrándose en los 14 compartimentos musculares mediales que pueden producir una torsión en varo para proteger el UCL y simplificar los cuatro subcompartimentos del Flexor Digitorum Superficialis para que comiencen en el mismo punto de inserción.
Escalando
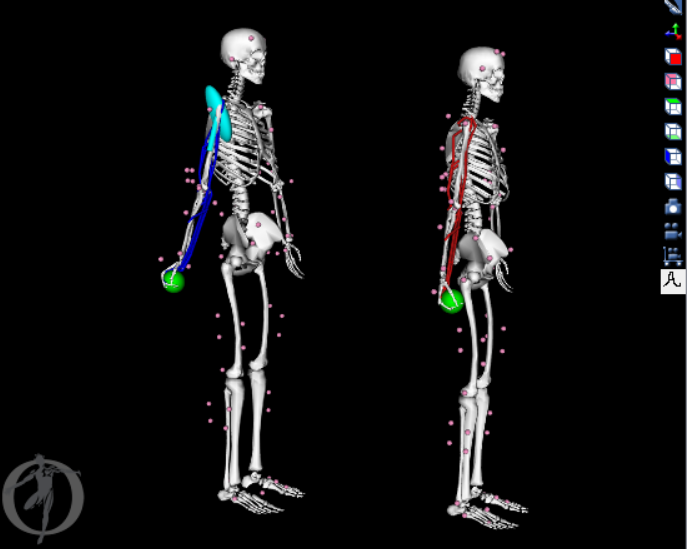
- Modelo a escala a la izquierda: más alto y con más masa, músculos en azul y rojo, marcadores virtuales en rosa
Además de capturar un movimiento de un lanzamiento, el sujeto también se filma en una postura estática de pie que nos permite escalar el modelo genérico a un lanzador individual. Al colocar marcadores virtuales en el modelo en las mismas ubicaciones que en la prueba registrada, los segmentos del cuerpo se escalan linealmente para que coincidan con las dimensiones reales de un cuerpo individual. Este proceso también actualiza la masa de cada segmento del cuerpo para alinearse con la nueva masa total del sujeto, así como para ajustar las trayectorias y longitudes musculares.
Cinemática inversa
Con un modelo a escala, ahora estamos listos para seguir inicialmente el movimiento grabado y recrear los ángulos y aceleraciones articulares asociados a través de un enfoque tradicional de cinemática inversa. Los marcadores están ponderados para reproducir mejor el movimiento general y los cuadros de tiempo se notan para eventos clave durante el lanzamiento con un enfoque en el rango de torsión de valgo más alto desde el amartillamiento (arm cocking) del brazo hasta la rotación externa máxima al soltar (5).
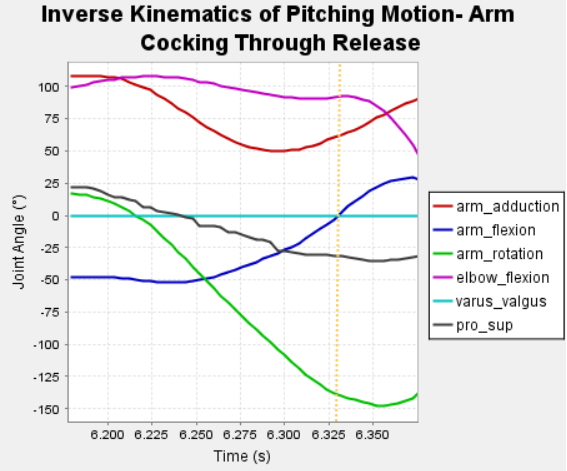
- Notas: La línea punteada es el momento de torsión máxima de Valgus, el codo se está flexionando, justo antes de la rotación externa máxima (MER)
- El grado de libertad (DOF) del Varus-Valgus está bloqueado ya que solo hay muy poca relajación en la articulación
Al completar un análisis cinemático inverso, podemos confirmar que el movimiento de lanzamiento se ha reproducido con precisión, y también proporcionar las trayectorias del marcador central que un análisis Dinámico Progresivo basado en el músculo intentará seguir.
Dinámica inversa
También producimos un análisis tradicional de dinámica inversa que calcula las fuerzas generales y las torsiones a partir de la cinemática del movimiento para confirmar el instante específico de la torsión máxima del codo valgo y su magnitud.
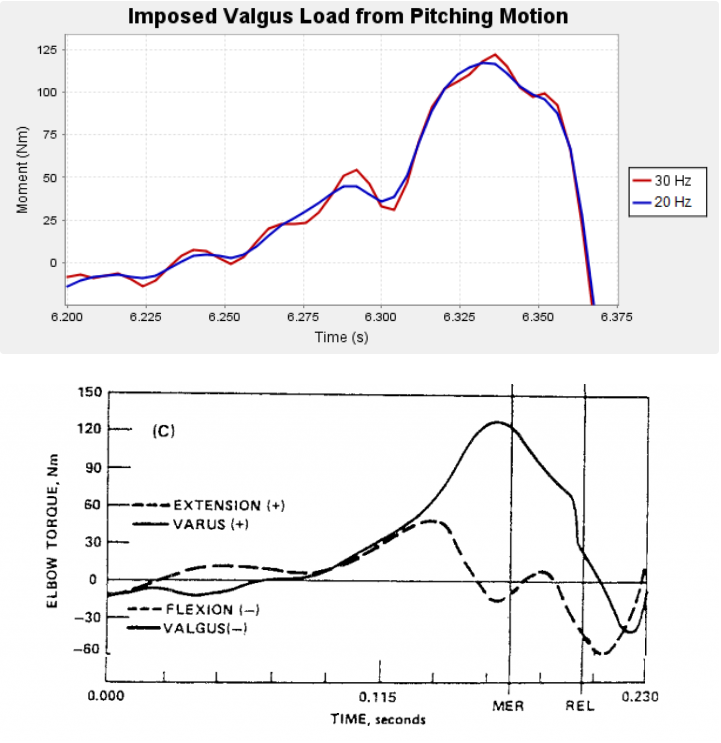
- Comparación de la torsión de Valgus impuesto en el modelo (arriba) y con la investigación de Fleisig (abajo)
En nuestra simulación, la carga máxima del valgo se mide como aproximadamente 120 Nm a 6.33s, que ocurre justo antes de la rotación externa máxima (MER) a 6.35s. El movimiento se filtra a diferentes frecuencias para eliminar el ruido, con 30 Hz utilizados en este estudio para obtener una visión precisa de las torsiones que actúan sobre el codo.
Análisis de reducción residual
Luego se realiza un ajuste final al modelo antes de que estemos listos para iniciar el análisis de Dinámica Progresiva. Para reducir los errores experimentales y garantizar la precisión de las masas actualizadas desde el paso de escala inicial, la simulación se ejecuta solo con actuadores de torsión ideales, así como con entradas de las fuerzas de reacción al suelo registradas por las placas de fuerza. Este paso utiliza un Algoritmo de reducción residual para hacer pequeños ajustes necesarios a las masas de los cuerpos del modelo, así como al centro general de masa para obtener consistencia dinámica con las fuerzas de reacción del terreno medidas. Cuando estos ajustes son una pequeña porción (menos del 2%) de la masa total del modelo, podemos confirmar que el modelo, su movimiento y las fuerzas terrestres están vinculados y representan con precisión la prueba registrada.
——-
¡Ahora estamos listos para comenzar un análisis Dinámico Progresivo utilizando el control muscular computarizado de OpenSIM! En la próxima publicación de blog de esta serie, exploraremos el proceso de CMC y veremos los resultados de las contribuciones musculares individuales, la fuerza de compresión articular asociada y la carga total en el UCL a medida que continuamos con la validación de nuestra estructura de simulación.
Fuentes:
1) James H. Buffi, Katie Werner, Tom Kepple, and Wendy M. Murray, Computing muscle, ligament, and osseous contributions to the elbow varus moment during baseball pitching Ann Biomed Eng. 2015 Feb;43(2):404-15
2)Alderink, A., T. Kepple, K. L. Siegel, A. Razzook, and S. Stanhope. Sources of forward ball velocity in a pitched baseball. Paper presented at 32nd Annual Meeting of the American Society of Biomechanics 2008; Ann-Arbor, MI.
3)Saul, K. R., X. Hu, C. M. Goehler, et al. Benchmarking of dynamic simulation predictions in two software platforms using an upper limb musculoskeletal model. Comput. Methods Biomech. Biomed. Eng. 2014. doi:10.1080/1025 5842.2014.916698.
4)Buchanan, T. S., S. L. Delp, and J. A. Solbeck. Muscular resistance to varus and valgus loads at the elbow. J. Biomech. Eng.-T. ASME 120:634–639, 1998
5)Glenn S Fleisig, Rafael F Escamilla, Biomechanics of the elbow in the throwing athlete, Operative Techniques in Sports Medicine 4(2):62-68 · April 1996
6)Thelen, D. G., F. C. Anderson, and S. L. Delp. Generating dynamic simulations of movement using computed muscle control. J. Biomech. 36:321–328, 2003.
Comment section